To start off the new season, myself and a few other SCA members have undertaken the challenge of a CAD in 3 days. This particular topic is dedicated to mine. I’ve actually finished early, so you could call this a Cad in 2 days.
Firstly, let’s discuss my thought process for coming up with a viable design. As I’m sure many of you thought, This game appeared to be perfectly suited for gateway robots, without changed anything about them really. A tray on a 4 bar is I’m sure, going to be the main design early season. It’s simplicity and effectiveness is very good, especially when people had all of TT to get good at side rollers and trays. But then I did a little more thinking, and upon realizing how short these goals are, it seemed a waste to me to bother lifting. If you have to get objects to 18" goals, and you can make an 18" tall robot, you don’t need to lift, just bring the balls to the top of the robot. So then I thought of having a ramp lined with rollers, which would intake balls at the bottom, and pull them up the ramp out the back. the issue with that would be you would have to turn around every time you wanted to switch between scoring and descoring. So then I realized I want to have a front-intaking tube system to take cubes from the floor or goals and bring them up and around to the front. So basically I just removed the wheel from a flywheel, replaced it with an indexer. Balls go in the front, up an intake system, and out the top and front. Simple. But it was difficult to direct the balls forward as well as up to get them to actually land into the goals without really shooting the ball, which I did not want to do. So I then thought of having a flipout hood so I could actually make my robot taller than the goals. This was very simple and easy, and I think is a very good alternative to lifting. I came up with most of these solutions on the go as I was CADding, with some assistance/advice from @ZackJo, @mvas, @meepmeepme, and @Sylvie.
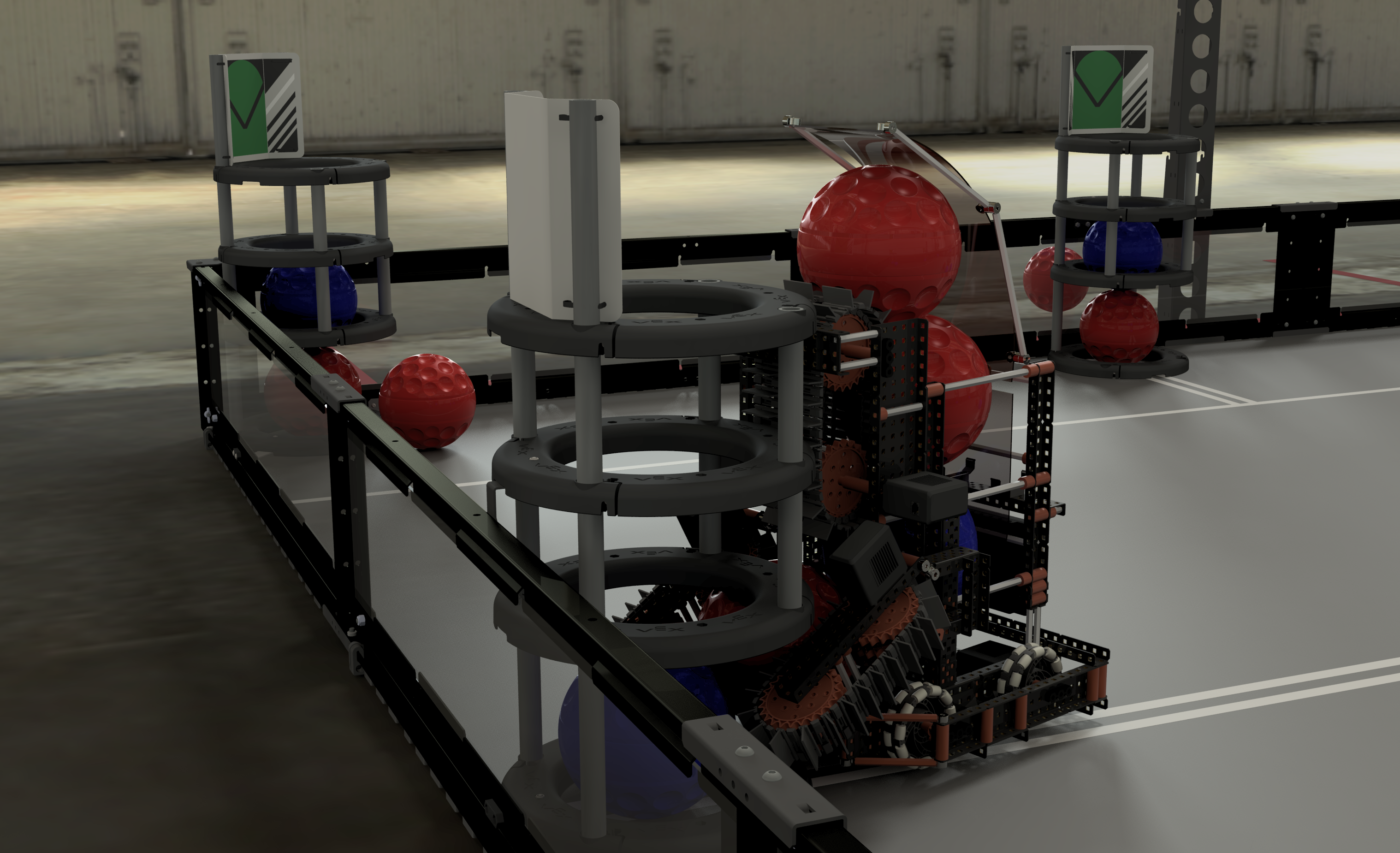
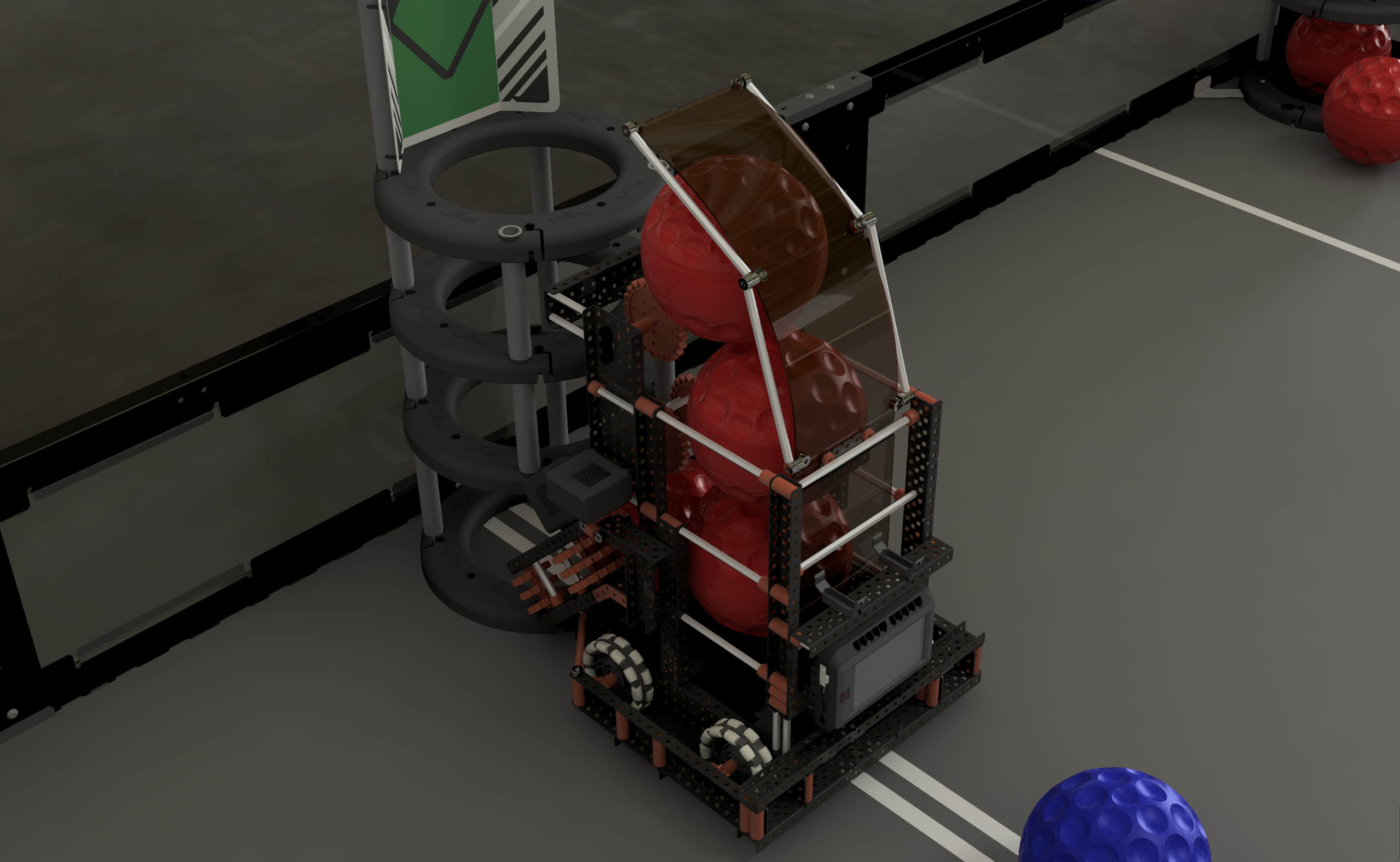
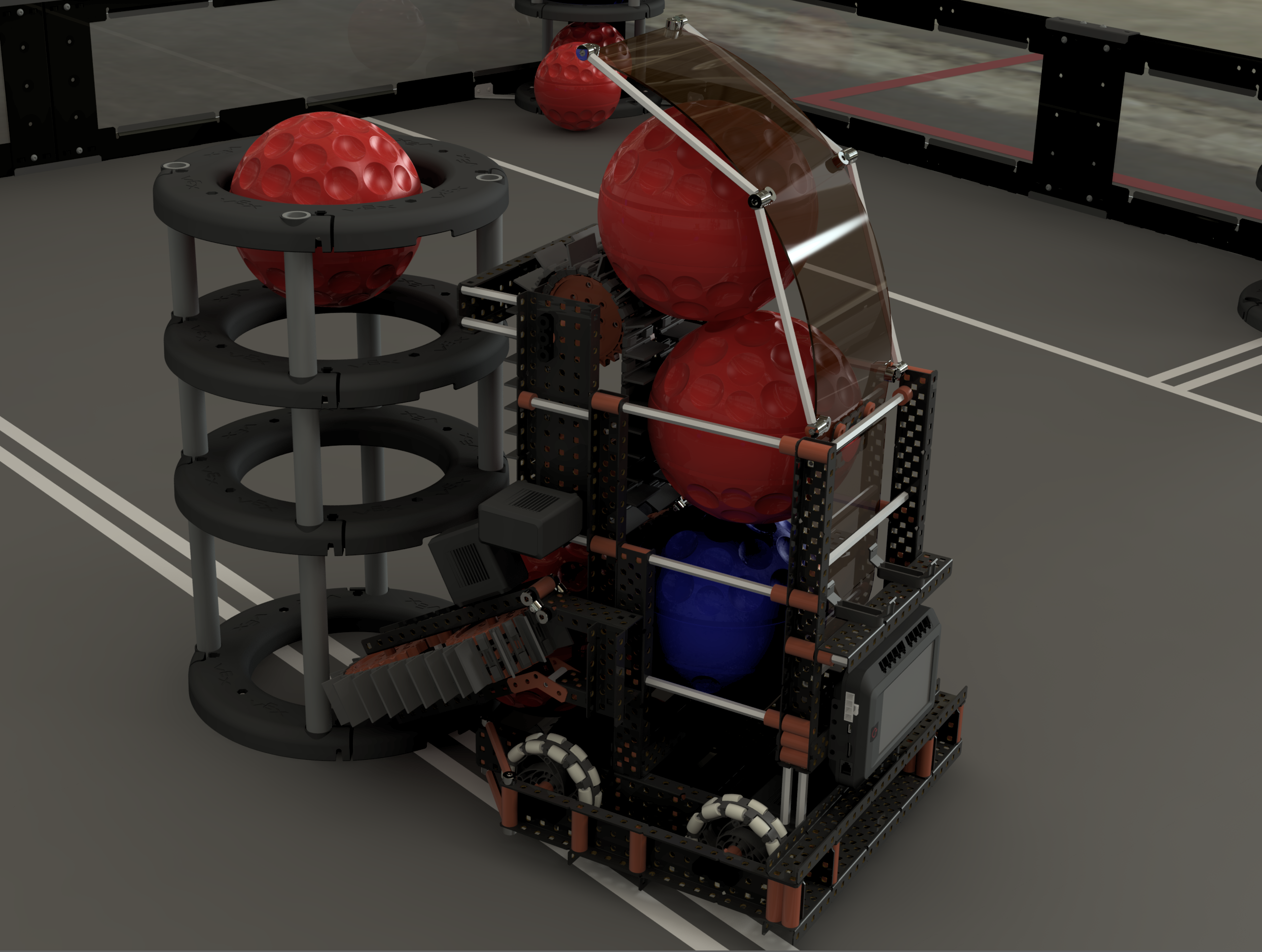
So, here are some renders showing the robot and how it scores.
This picture demonstrates the 4 ball capacity. It was originally intended to have only 3 ball capacity, but the flipout hood game me some extra space.
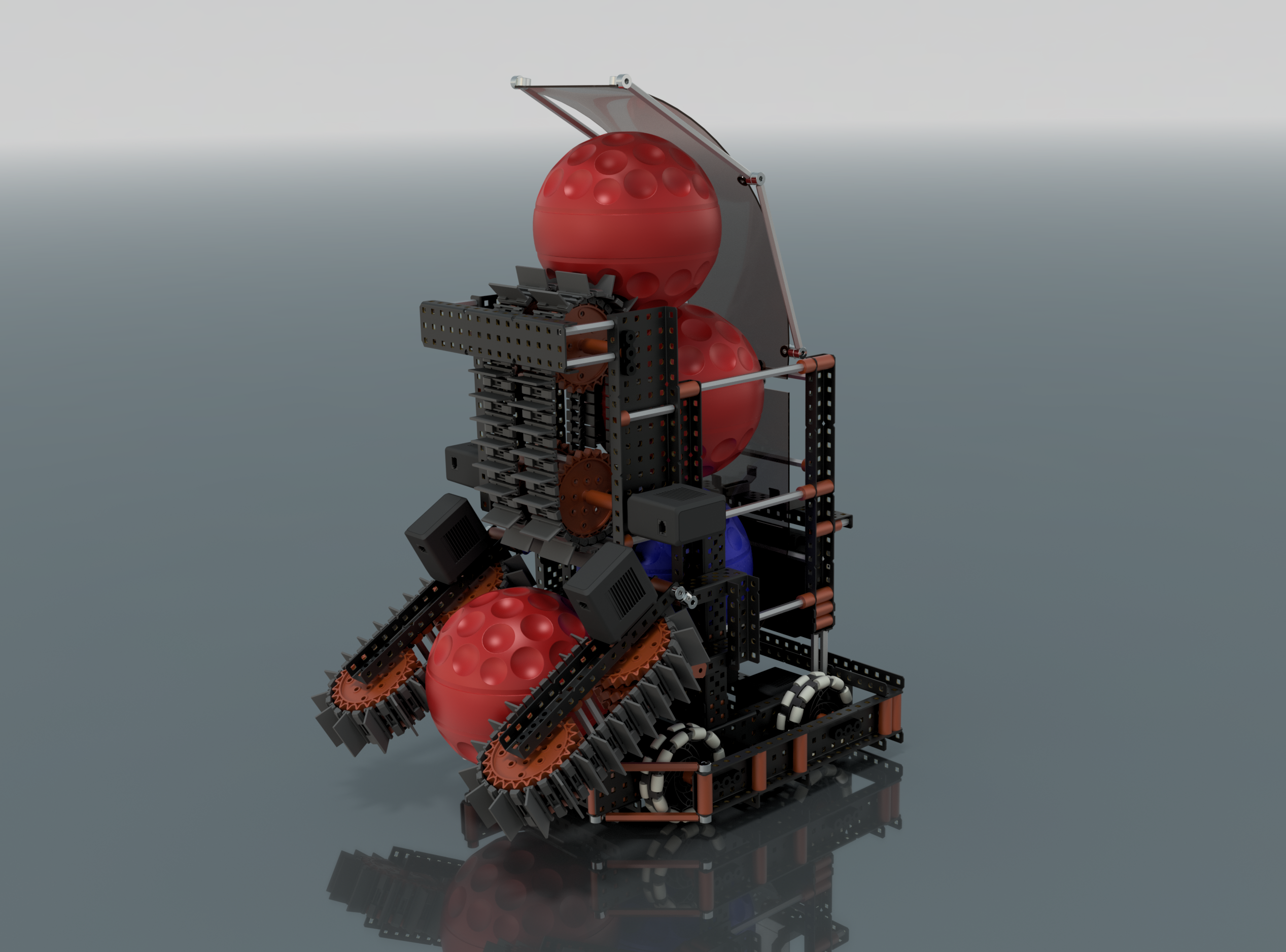
Here is an isometric render of it without any balls in. You can easily see the hood system, which I would line with a combination of antislip and adhesive foam if I were to build it. (which I probably will)
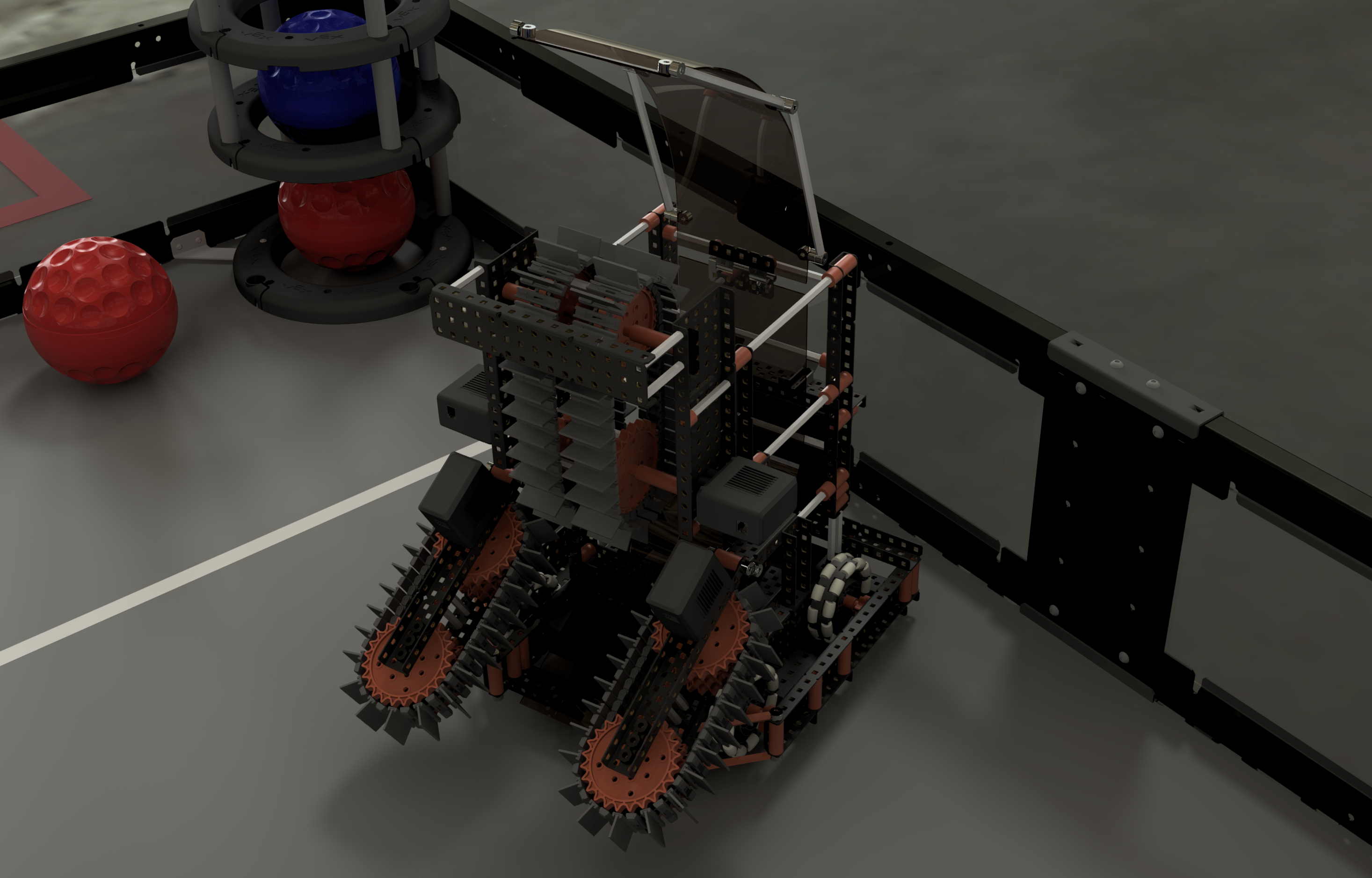
Here you see it about to score. The Intakes and Indexer would both be 600 rpm,
which will sort of gently toss the balls into the goals. Not shoot them, but toss them. Just a small amount of momentum to make sure the balls clear the rim of the goal. You can also see how the side rollers at the bottom are for the purpose of descoring balls from the goals, which means I can be descoring and scoring simultaneously. This is key if I have a hood full of my balls and I want to replace a goal full of my opponents, I can do so without moving at all, in one fluid, efficient motion. Then I can spit out your opponents all over the place to make it difficult for them to retrieve, or I could hold on to them to stop them from getting them, if that meets my strategy.
Robot Breakdown:
4m 200 rpm on 3.25" omnis. If I build this, I will definitely gear up the drive for a nimble, maneuverable robot.
2m 600 rpm 24t side rollers (basically fast tower takeover intakes)
2m 600 rpm 24t indexer (basically fast vertical tower takeover intakes lol)
This robot can perform all the tasks a competitive robot should this year:
- hold 3+ balls at once
- replace a goal full of opponent balls with your own quickly.
- quickly top off many goals quickly to get the row bonuses.
- complete the home row in auton
- play competent defense
So in conclusion I do not see this robot becoming the sole meta, despite other people having thought of it already, because the tray lift still seems viable, especially if it has descoring intakes on the base. I predict this kind of robot will be about even with tray lifts in terms of efficiency, and I’ll be interesting in seeing how the two designs evolve and progress this season.
I made and rendered this robot using Autodesk Inventor. If you have any questions, please ask, I will answer them. And I wish you good luck this season.